











|  |
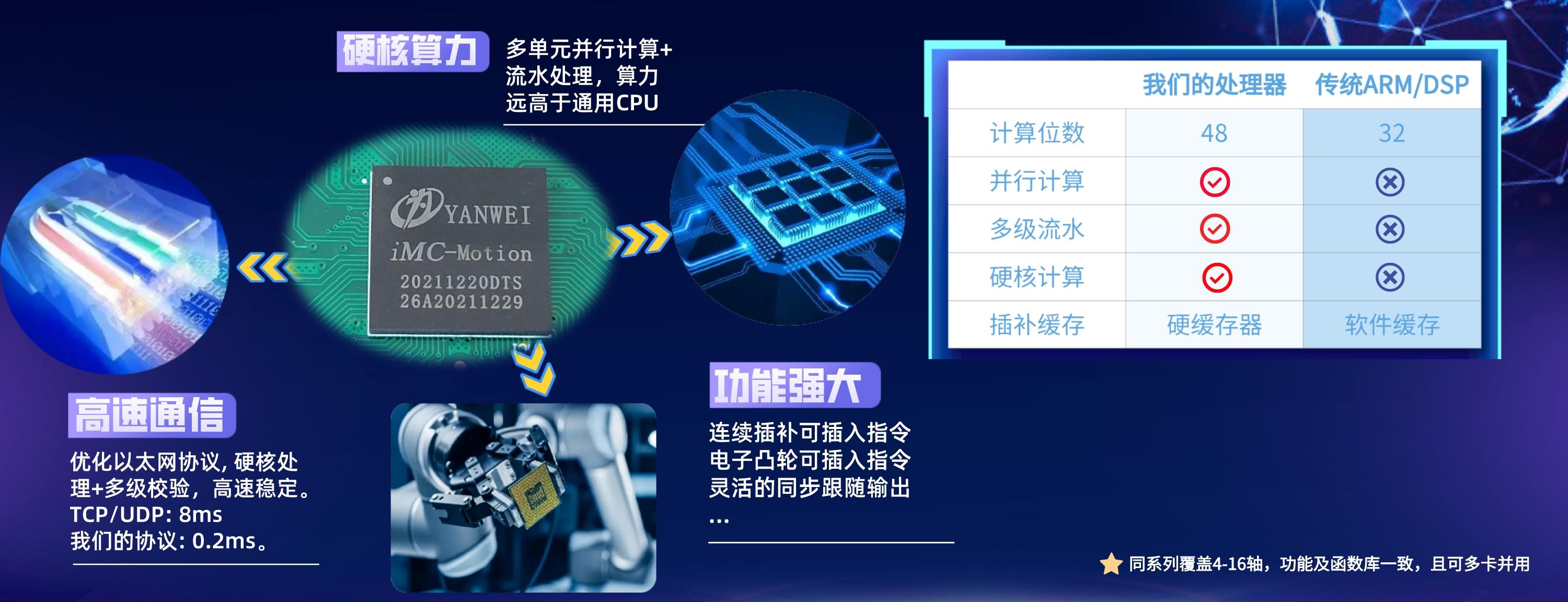
高速实时以太网通信,硬件协议处理机,通信环响应小至50uS,四级校验监控,确保可靠,最多可同时连接64套控制卡。 | 单芯片全系统集成运动控制运算单元,插补等所有控制算法由硬件处理,速度快、精度高,输出平滑。 |
 | |
| 驱动器接口为两个RJ45插座,连接便捷。分离指令脉冲输出和编码器反馈输入,减少串扰;可采用带屏蔽水晶头、传输线,有效提高抗干扰性。 | |
(1) 实时以太网接口,用于与计算机高速通信;
(2) 4~16个轴接口(详见下表),用于连接伺服/步进驱动器;
(3) 每轴均有编码器输入接口、伺服使能、伺服复位、伺服到位、伺服报警、正/负限位开关、原点开关等接口;
(4) 1个辅编码器接口,可用于连接电子手轮等;
(5) 1个停止开关输入,可用于连接停止/急停开关。
(6) 开关量输入和输出的数量见下表。
(7) 8路0~10V模拟量电压输入;(仅iMC4xxA系列)
(8) 4路﹢10V~-10V模拟电压输出;(仅iMC4xxA系列)
(9) 4路高精度PWM输出。(仅iMC4xxA系列)
(10) 支持4~100字符用户自定义加密,保护系统集成商的知识产权。
iMC4xxE/A系列各型号硬件资源
型号 | 轴接口数 | 开关量输出 | 开关量输入(不含轴IO) | AD通道 | DA通道 | PWM通道 |
iMC404E | 4 | 48 | 32 | 0 | 0 | 0 |
iMC408E | 8 | 48 | 32 | 0 | 0 | 0 |
iMC412E | 12 | 48 | 32 | 0 | 0 | 0 |
iMC416E | 16 | 48 | 32 | 0 | 0 | 0 |
iMC406E | 6 | 40 | 32 | 0 | 0 | 0 |
iMC410E | 10 | 40 | 32 | 0 | 0 | 0 |
iMC414E | 14 | 40 | 32 | 0 | 0 | 0 |
iMC404A | 4 | 32 | 32 | 8 | 4 | 4 |
iMC408A | 8 | 32 | 32 | 8 | 4 | 4 |
iMC412A | 12 | 32 | 32 | 8 | 4 | 4 |
iMC416A | 16 | 32 | 32 | 8 | 4 | 4 |
iMC406A | 6 | 32 | 26 | 8 | 4 | 4 |
iMC410A | 10 | 32 | 26 | 8 | 4 | 4 |
iMC414A | 14 | 32 | 26 | 8 | 4 | 4 |
(1) 点到点运动,运动过程中可任意改变目标位置和速度;
(2) 连续速度运动;
(3) 电子齿轮运动;
(4) 电子手轮运动;
(5) 插补运动:任意两轴圆弧插补、多轴直线插补、螺旋线(圆弧+直线)插补,支持微小线段连续插补,支持两个插补空间同时插补;
(6) 点插补模式:由上位机计算插补点发送到控制卡的PFIFO,由控制卡输出电机的指令位置;(7) 支持在插补段/点之间插入非插补指令:如开关量输出、改变某个参数、等待指令等;
(8) 轮廓运动模式(上位机粗插补,控制卡样条拟合及精插补);
(9) 比例跟随功能:某参数的值按线性比例地跟随另一参数值的变化而变化;
(10) 龙门驱动(双电机驱动/主从跟随运动);
(11) 位置捕获锁存:探测到探针开关信号将当期位置锁存入FIFO;
(12) 位置/位移比较输出功能;
(13) 进给倍率控制、暂停等;
(14) 反向间隙补偿和线性补偿;
(15) DA的输出电压可跟随插补速度等参数的值按线性比例地输出;(仅iMC4xxA系列)
(16) PWM输出的占空比或频率可跟随插补速度等参数的值按线性比例地输出/位置同步输出(PSO);(仅iMC4xxA系列)
(1) 全集成运动控制引擎,高达48位计算,高精、高速、高可靠;
(2) 100M实时以太网与计算机通信,纯硬件协议机,通信响应小至50uS,四级校验,确保可靠;计算机最多可连64块控制卡(通过交换机);
(3) 运动控制周期:1mS;
(4) 单卡最高16轴独立/插补运动控制;
(5) 脉冲输出最高频率:6Mhz;
(6) 编码器最高输入频率6MHz;
(7) 32位指令和反馈位置:-2147483648~2147483647,即[-2^31,2^31-1);
(8) 位置误差:≤ 1 PULSE;
(9) 指令速度分辨率(误差):<0.002%;
(10)模拟量输入电压范围:0~10V,精度12位。每通道的采样频率:5120Hz/n,(n为启用的通道数)。
(11)模拟量输出电压范围:-10V~+10V,等效精度为12位,0~500Hz;
(12)高精度PWM输出;
湿度:5% ~ 90% 无凝结.
(五)开发环境
(1)Windows系统
(2)Linux系统
(3)WinCe系统(触摸屏使用)

若连接步进驱动器,一般情况下只需连接脉冲指令和方向等信号,因此一般只需连接其中的一个RJ45插座(即AXn_A座),如图所示:

(七)可选附件


(八)常见问题回答
(2)系统级超大规模芯片集成所有运动控制功能,所有插补等算法均在芯片内部由硬件高速运算,运算的速度、精度及脉冲输出平滑度绝非普通控制芯片或基于微处理器的方案能比拟。
(3)4~16轴全系列(4轴、6轴、8轴、10轴、12轴、14轴、16轴)。iMC4xxE/A系列所有型号仅轴数的差别,函数库、功能、性能、用法全兼容。客户的系统若因升级需增加轴数,只需更换相应轴数的控制卡,并在原程序上改动即可;
9、iMC4xxE/A系列运动控制卡可以在Linux系统上面开发吗?
答:可以的,已经封装好Linux的函数库,函数名称、函数的参数与函数用法可参考使用手册。
另外,我们提供详尽的二次开发资料以及专业技术支持,让应用者无后顾之忧。
广州市研为电子科技有限公司
电话:020-39337878
投诉电话:18928950288
微信号:yw39337878(销售),gzyanwei03(技术支持)
Email:info@gzyanwei.com
地址:广州市番禺区番禺大道北555号番禺节能科技园科技创新大厦50A
销售微信二维码

