



.jpg")
.jpg")
.jpg")
.jpg")
.jpg")
.jpg")
.jpg")
.jpg")
.jpg")
.jpg")
|
|
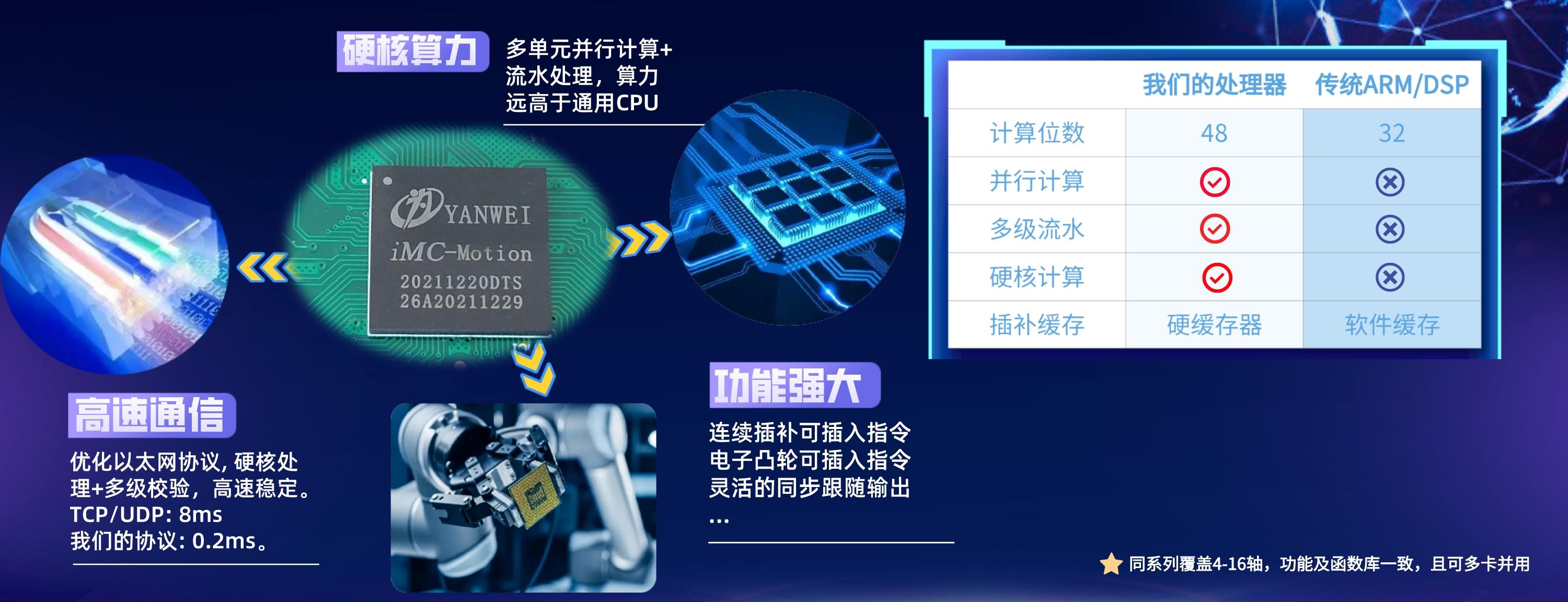
高速实时以太网通信,硬件协议处理机,通信环响应小至50uS,四级校验监控,确保可靠,最多可同时连接64套控制卡。 | 单芯片全系统集成运动控制运算单元,插补等所有控制算法由硬件处理,速度快、精度高,输出平滑。 |
| |
iMC3xx2E系列各型号硬件资源
型号 | 轴接口数 | 开关量输出 | 开关量输入(不含轴IO) | AD通道 | DA通道 | PWM通道 |
iMC3042E | 4 | 48 | 32 | 0 | 0 | 0 |
iMC3062E | 6 | 40 | 32 | 0 | 0 | 0 |
iMC3082E | 8 | 48 | 32 | 0 | 0 | 0 |
iMC3102E | 10 | 40 | 32 | 0 | 0 | 0 |
iMC3122E | 12 | 48 | 32 | 0 | 0 | 0 |
iMC3142E | 14 | 40 | 32 | 0 | 0 | 0 |
iMC3162E | 16 | 48 | 32 | 0 | 0 | 0 |
(一)主要运动控制硬件资源
(1)100M实时以太网高速通信(iLink),支持通过WIFI路由器无线通信。;(2)最多可同时控制16轴伺服电机或步进电机;(2)脉冲+方向或正向脉冲+负向脉冲输出模式可选,差分/单端(集电极开路)输出可选;(3)共有32个全局开关量输入以及每轴6个开关量输入,包括正、负极限开关输入、原点开关输入、探针开关、伺服报警和伺服到位输入;(4)共有48个开关量输出,最大容许电流为500mA,可直接驱动小电流的继电器、电磁阀等。其中有16个可以设置上电初始时的通断状态;(5)每轴均有编码器输入接口、伺服使能、伺服清零、伺服到位、伺服报警接口;(6)1个辅助编码器接口,可用于连接电子手轮、光栅尺等正交编码器设备;(7)1个停止开关输入,可用于连接急停开关。
(二)主要指标(1)100M实时以太网通信,纯硬件协议处理机,通信响应小至50uS,四重校验监控,确保可靠;一台主机最多可同时连接64套控制卡(通过交换机扩展);(2)运动控制周期:1mS;(3)最高16轴独立或同步/插补运动控制;(4)脉冲输出最高频率:8Mhz;(5)编码器最高输入频率8MHz;(6)32位的指令和反馈位置范围(PULSE);(7)位置误差:≤ 1 PULSE;(8)指令速度分辨率(误差):小于0.002% (9)48位精度电子齿轮传动比;(10)内部48位的计算处理;(11)事件指令处理时间< 0.1uS;(12)高度集成的单芯片核心控制,系统高可靠性;(13)所有输入输出信号均经过隔离,高速信号:rms 2.5KV,I/O:rms 3.5KV,具有高抗干扰能力;(14)所有开关量输入均经过数字滤波;(15)所有输入输出均直接以EIA/TIA-422差分对或24V电平进出控制器,增强信号的抗干扰能力;(16)支持4~100字符用户自定义加密,保护系统集成商的知识产权;(17)支持远程升级固件; (18)其中若干轴可定制为高精度PWM输出,多种输出模式,详情请联系本公司技术工程师;(19)函数库支持WINDOWS平台和WinCE嵌入式操作系统,可组成PC+运动控制卡或工业平板电脑+运动控制卡的系统,之间采用以太网通信。若需要WinCE平台下的函数库,请联系本公司客服。

(三)主要控制功能1. 每个轴支持线性轴和环形轴。2. 每个轴支持双坐标系下的规划运动:主坐标系统MCS和辅坐标系统PCS。在主坐标系下的运动过程中,可同时叠加辅坐标系下的点到点或连续速度运动。3. 连续(速度)运动。(1)支持同时存在主、辅两个坐标系下的连续速度运动;(2)先进的智能S速度曲线控制,加减速过程更平滑;(3)速度斜升并到达目标速度的过程可以与其它变量同步,如与位移同步或与时间同步等;4. 点动(JOG);5. 点到点运动(1)支持双坐标系同时执行点到点运动,实现叠加运动;(2)支持以绝对位置和相对距离的方式给出运动目标;(3)支持普通模式和跟踪模式。(4)先进的智能S曲线加减速规划算法,支持非对称的加速和减速过程,在运动过程中的可任意改变目标位置或移动速度。(5)可临时暂停运动过程。6. 电子齿轮运动。(1)48位传动比率,实现高精度的齿轮传动,误差小于一个最小位移单位。(2)从动轴可以跟随主动轴的各种指令位置值,或编码器反馈值。(3)支持自由的接合过程和同步的接合过程,接合时主动轴可以处于加速或匀速运动。(4)可以在任何时刻改变传动比率。传动比率改变后,可以自由地或同步地达到新的传动速度。(5)脱离啮合后的运行模式有两种:按原传动速度或指定速度运行(或减速停止)。(6)支持自由的脱离啮合过程和同步的脱离啮合过程。(7)可与事件指令结合,实现灵活的同步运动。(8)执行电子齿轮运动的同时可以叠加辅坐标系下的点到点运动。7. 电子手轮运动。8. 时间/位移非线性同步运动。9. 插补运动。(1)支持两个插补空间同时执行插补运动,即两组轴同时执行插补运动;(2)每个插补空间均支持1个轴~全部轴连续直线插补,内部硬件高速高精插补运算;(3)每个插补空间均有大容量缓存器,支持海量微小线段连续插补;(4)段与段的衔接过渡采用三阶融合技术,平滑微小线段在过渡时刻的冲击;(5)支持任意两轴圆弧插补;(6)支持螺线线插补;(7)支持两轴圆弧+若干轴线性插补,线性轴参照圆弧路径按比例推进;(8)可以在插补段之间插入写参数指令、位操作指令、等待指令、事件指令,灵活实现复杂的同步运动,如I/O与路径运动的同步等;(9)可以指定每段的运行速度和段末速度;(10)每个轴可以设置相对坐标或绝对坐标;(11)直线段可以选择基于X、Y、Z的合成路径来规划速度,也可以基于某单个轴的移动距离来规划速度;圆弧段基于圆弧路径规划速度;(12)可实时改变速度比率,速度比率可以大于1,或小于1;(13)可暂停/继续插补。10. 轮廓运动。轮廓运动是指由主机计算点位数据(主机软件插补),由iMC进行平滑拟合及精插补。适合用于用户自行开发的插补算法。11. 搜寻及设置机械原点(回零)。(1)支持三类机械硬件:A. 仅有原点开关;B. 原点开关+编码器索引信号(Z相); C. 仅有编码器索引信号。七中回零方式。(2)可以设置高速和低速两个搜寻速度。(3)可向任何一个方向出发搜寻原点,遇到限位自动返回。(4)可以设置搜寻到原点位置后,自动移动到指定的位置(homestpos)。(5)可以设置原点位置的偏移值(homepos)。(6)可以指定检测原点开关的上升沿或下降沿。(7)可以直接使用原点开关信号或主编码器的索引信号来设置原点。(8)主机在任何时候(包括运动中)都可以通过指令直接设置当前点为原点。12. 事件指令编程独创的事件处理机,可通过时EDM(Event-Driven Motion)事件处理机制来灵活实现各种同步,如IO同步。13. 位置捕获每轴均有探针触发的位置锁存功能,锁存值压入缓存器(FIFO),可实现连续多点锁存,FIFO深度为128x32bit。14. I/O计数器每轴的探针开关输入也可以用于I/O计数,对输入开关的有效边沿进行计数。15. 其它辅助功能如暂停、临时停止输出指令脉冲、位置断点、计时等。16. 运动平滑先进的智能平滑算法,使加速度的导数连续。17. 静止误差补偿。具有静止误差补偿功能,即在规划运动完成时实施误差补偿,保证误差落在可设定的“窗口”范围内,步进电机添加编码器也可以实现闭环控制。18. 错误与安全提供多级错误检测及安全防护功能:(1)指令数据监控(2)加速度限制;(2)速度限制;(3)伺服报警;(4)硬件限位开关;(5)软件位置限位;(6)指令位置异常监测;(8)位置误差超限;(9)急停开关。19.运动状态标识20.动态跟随窗口21.编码器位置反馈22.多指令FIFO设计,各指令FIFO互相独立,便于多线程设计;23.支持等待指令、位操作等,便于实现时序控制和I/O操作。
(四)其它辅助应用开发资源1、iMCSOFT:运动控制系统开发调试平台 iMCSOFT是针对iMC系列运动控制卡开发的应用开发调试软件,用于辅助用户加快运动控制应用的开发过程。用户可以通过iMCSOFT读取或写入所有参数或寄存器的值。iMCSOFT软件下的编程采用一种类似于BASIC的语言,语法简单、易用,如: for a=0 to 4 do ;循环执行5次 wr mcsdist 10000 1 ;轴1的mcsdist写入100000 wr mcsgo -1 1 ;轴1的mcsgo参数写入-1(FFFFh) waitparam mcsmoving 1, 0, 0,1 ;等待移动完成 next ;循环结束
2、动态链接函数库。 用户可调用函数库用C、C++、VC++、VB、.Net、Delphy、Labview等高级语言编写Windows下的应用软件。在iMCSOFT下使用的指令,绝大多数都能在动态链接函数库中找到对应的函数,且格式相似,因此,只要在iMCSOFT平台下编程调试了的控制功能,都可以用高级语言调用相应的函数编程实现,从而可以快速地开发出用户的应用软件。3、iMCSOFT的例子程序以及VC、VB、Labview下的例子程序,通过这些例子程序,用户可以快速地了解控制卡的编程方法。
(五)操作环境操作温度:0 ~ 60 ℃储存温度:-20 ~ 80 ℃湿度:5% ~ 90% 无凝结.
(六)开发环境
(1)Windows系统
(2)Linux系统
(3)WinCe系统(触摸屏使用)
(七)关于驱动器连接
采用RJ45座作为驱动器连接口是该控制卡的特色之一,可采用5类(CAT5)或六类(CAT6)以太网线,一端压制水晶头,另一端的线焊接到伺服驱动器的插头(常见的为SCSI-50P插头),如图所示”

若连接步进驱动器,一般情况下只需连接脉冲指令和方向等信号,因此一般只需连接其中的一个RJ45插座(即AXn_A座),如图所示:

(七)可选附件 (1)带屏蔽双绞以太网线,其中一端为水晶头(带屏蔽壳,触片镀金)另一端为剪断的网线截面。用于连接控制卡和驱动器。有灰色和黄色可选,长度和价格请咨询销售人员。(2)外壳。金属外壳,请咨询销售人员。
(1)带屏蔽双绞以太网线,其中一端为水晶头(带屏蔽壳,触片镀金)另一端为剪断的网线截面。用于连接控制卡和驱动器。有灰色和黄色可选,长度和价格请咨询销售人员。(2)外壳。金属外壳,请咨询销售人员。
(八)常见问题回答
1、这控制卡要求使用总线型的伺服驱动器吗?答:该控制卡是通过以太网总线与上位机(计算机)通信,但驱动器还是使用普通的使用脉冲+方向指令的驱动器,支持伺服驱动器和步进驱动器。
2、该型号的控制卡为什么那么多RJ45以太网插口?驱动器是否也必须有这种插口?答:控制卡上正面的RJ45插口是用于连接伺服或步进驱动器的,即输出脉冲、方向等指令信号,以及伺服使能、伺服报警、伺服到位、伺服误差复位、编码器反馈等信号。连接控制卡和驱动器的线一端压入RJ45的水晶头,而另一端则是焊接到伺服驱动器的插座,如本网页“(六)关于驱动器连接”的图示。因此,驱动器端无需具备RJ45的插座。采用这种RJ45插座,使得与驱动器的连接取材、连接等更便捷。
3、这种通过RJ45连接驱动器的接口方式头一次见,是否可靠?答:采用RJ45插口这种连接方式是该产品的一个小创新,以太网线取材非常方便,带屏蔽的RJ45水晶头、带屏蔽的双绞以太网线具有很好的抗干扰性。水晶头上的卡扣可有效牢固地卡住插座。经实际使用检验,该接口方式非常可靠。
4、为什么每个轴有两个RJ45插座?答:每个轴两个RJ45插座分别定义为AXn_A和AXn_B,用于提供脉冲、方向等指令信号,以及伺服使能、伺服报警、伺服到位、伺服误差复位、编码器反馈等信号,其中AXn_A主要提供脉冲、方向指令信号、伺服使能、伺服报警等信号;而AXn_B则主要提供编码器的反馈接入、伺服到位和伺服误差复位等接口。因此,步进电机驱动器只需接AXn_A,伺服驱动器则两个都连接,当然,若无需接入编码器反馈,也不需要连接AXn_B插座。
5、插补运算是在控制卡里面实现的还是在上位机计算的?答:iMC3xx2E系列的运动控制卡的所有控制算法,包括多轴直线插补、圆弧插补、螺旋线插补等都是在控制卡上的核心——iMCIII运动控制芯片硬件实现的,主机无需做插补运算,只需把相应的参数发送给控制卡上的芯片,即由芯片高速计算插补并输出。
6、能实现连续不间断插补吗?答:可以,iMC3xx2E系列支持海量微小线段连续高速插补,需要走连续插补轨迹时,只需不断地把插补线段送入缓冲器即可,插补器不断从缓冲器取出段进行插补。段与段之间的过渡可以通过设置smooth平滑因子实现三阶融合,使运动更平滑。插补过程中可以指定每一段的运行速度、或所有段执行同样的插补速度,可以在任意时候改变插补速度比率、暂停,更多功能请参考说明书。
7、可以独立运行吗?答:该系列产品不能独立运行,必须连接计算机并有计算机发送指令给控制卡。若需独立运行的控制器请关注我们的“WinCE分体式多轴运动控制器”,或咨询我公司人员。
8、iMC3xx2E系列是贵公司开发的产品吗?该产品主要有哪些优势?答:是的,iMC3xx2E系列是本公司开发的,具有多项领先的技术,主要特征有:
(1)高速实时以太网通信,与主机通信只需一根网线,连接方便可靠。硬件协议处理机,通信环响应小至50uS,四级硬件校验纠错,抗干扰性极强,非普通TCP/IP协议能比拟。可通过集线器/路由器扩展,最多可同时连接64块控制卡。
(2)系统级超大规模芯片集成所有运动控制功能,所有插补等算法均在芯片内部由硬件高速运算,运算的速度、精度及脉冲输出平滑度绝非普通控制芯片或基于微处理器的方案能比拟。
(3)4~16轴全系列(4轴、6轴、8轴、10轴、12轴、14轴、16轴)。iMC3xx2E系列所有型号仅轴数的差别,函数库、功能、性能、用法全兼容。客户的系统若因升级需增加轴数,只需更换相应轴数的控制卡,并在原程序上改动即可;另外,我们提供详尽的二次开发资料以及专业技术支持,让应用者无后顾之忧。
9、iMC4xxE/A系列运动控制卡可以在Linux系统上面开发吗?
答:可以的,已经封装好Linux的函数库,函数名称、函数的参数与函数用法可参考使用手册。
广州市研为电子科技有限公司
电话:020-39337878
投诉电话:18928950288
微信号:yw39337878(销售),gzyanwei03(技术支持)
Email:info@gzyanwei.com
地址:广州市番禺区番禺大道北555号番禺节能科技园科技创新大厦50A
销售微信二维码



